Columbia Creative Research Lab: Automated Foosball Table
Goal - Create an automated foosball table that is capable of playing Foosball using AI agents end to end without sensors to track the ball.
Tenure - 2024 to present
Role:
Undergraduate Researcher - Researcher responsible for designing and building the mechanical systems for the foosball table. Additionally, helping to implement algorithms for the AI agents.
Objectives:
- Manufacture and build a foosball table robot capable of playing foosball at a human level.
- Create simulated environment that can accurately reflect the factors in a foosball game.
- Develop a better understanding of the limits of AI agents and what factors drive them.
- Integrate high-speed, vision-based tracking systems and global-shutter camera technology to enable precise, real-time ball and rod state estimation without traditional sensors, providing accurate data for AI decision-making.
Tools & Technologies & Skills
- CAD: SolidWorks.
- Coding/Simulation: Python, C++, Mujoco, NVIDIA Isaac Sim.
- Skills/Developed: Project development from concept to completion, research on new topics, part selection, manufacturing & prototyping skills (3D printing, band saw, machining), system integration.
Contributions:
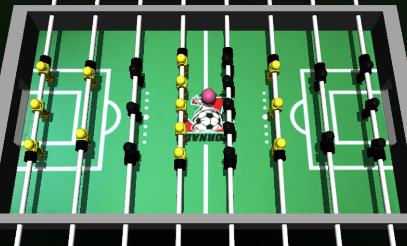
Mujoco Simulated Environment
- Created a simulated environment for the foosball table, sticks, and ball using physics simulator Mujoco.
- Tested and tuned physics attributes of the foosmen and foosball.
- Used simulated environment to train AI agents in python by running iterations of scoring the ball.
- Learned/Developed: Familiarity with simulated environments; Better understanding of Python and its libraries; Understanding of how AI agents operate; Proficiency in Github Version Control.
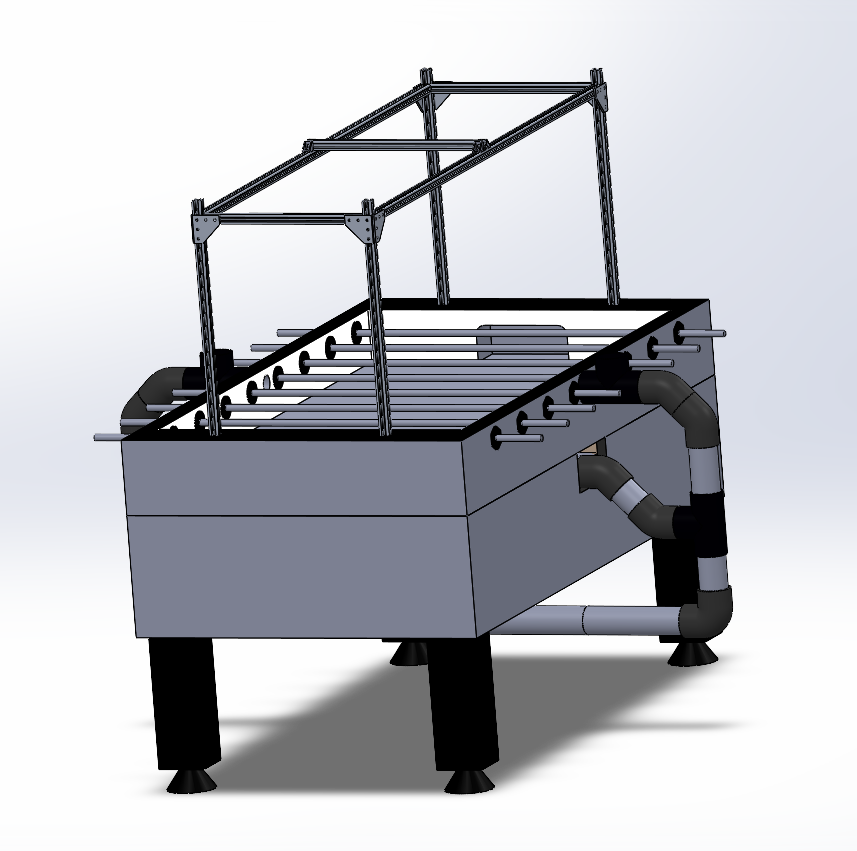
Full Foosball CAD
- Modeled entire CAD of foosball table, foosball camera stand, ball reset mechanism and foosball mechanisms in Solidworks.
- 3D printed parts for reset mechanism and foosball playing mechanisms.
- Helped select parts and materials to model in CAD and later adopted in build phase.
- Learned/Developed: Proficiency in Solidworks; Proficiency in version control; Learned methods of mechanical design.
Full Foosball Build
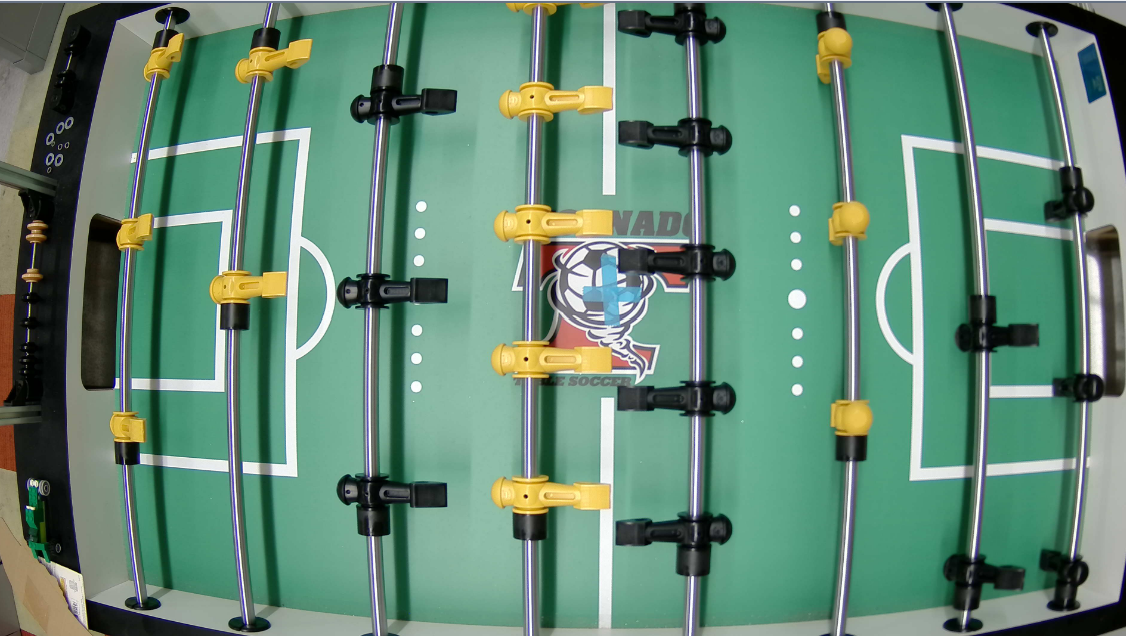
- Utilized 20x20 aluminum rail extrusions along with aluminum corner brackets to build stable camera stand on foosball table.
- Built a low-cost vision and reset system, selecting ELP 48mp camera to mimic human visual capabilities.
- Designed and implemented a multi-axis control architecture for the automated foosball table, selecting Teknic ClearPath-SC motors integrated via SC4-Hub configurations to support up to 16 actuated axes, with real-time, multi-threaded C++ control.
- Developed potential automatic ball reset mechanism facilitating the movement of the ball with a vacuum.
- Learned/Developed: Skills with structural framing with aluminum extrusions; Knowledge of camera selection for machine vision; Familiarity with multi-axis motor control integration; Used C++ for real-time robotic control; Better understanding of hardware-software robotic system design.