RIT VEXU Robotics

Goal - Design, build, and code 2 robots to compete in the VEXU 2023 Over Under Competition.
Tenure - September 2023 to June 2024
Role:
Mechanical Team Designer & Builder - Responsible for designing and building the robot from conception in Solidworks using VEX standardized parts.
Objectives:
- Create a 15x15x15in robot capable of both playing defensively and offensively in the VEXU Over Under competition.
- Create a 24x24x24in robot capable of launching "tri-balls" and work with field loaders.
- Work with software team to develop a robot capable of scoring large amount of points in the 1 minute 30 second autonomous phase.
- Develop a climbing mechanism capable of lifting the robots off the ground in a efficient manner to maximize points scored.
Tools & Technologies & Skills
- CAD: SolidWorks.
- Manufacturing: Molding, 3D printing, Soldering, Drill press, Laser cutting.
- Skills/Developed: >Low-profile mechanism design, drivetrain–intake–climb system integration, rapid prototyping and iteration, failure analysis and redesign, strategic competition-focused design, collaboration with software and drive teams.
Contributions:
Climbing Mechanism
- Co-developed a vertical bar winch-based climbing system capable of achieving C-tier elevation, using a one-way claw latch and spring-assisted deployment for reliable bar engagement.
- Designed the mechanism around a low-profile 15in chassis that allowed the robot to drive under the goal while still supporting full elevation capability.
- Integrated a power take-off (PTO) system from the drivetrain to supply torque for climbing while conserving motor allocation and space.
- Engineered a banded-out, double-acting pneumatic actuation to maintain elevation post-match and minimize piston stress.
- Learned/Developed: System integration under tight size constraints; balancing torque and mechanical stability; pneumatic control; strategic optimization for competition scoring tiers.
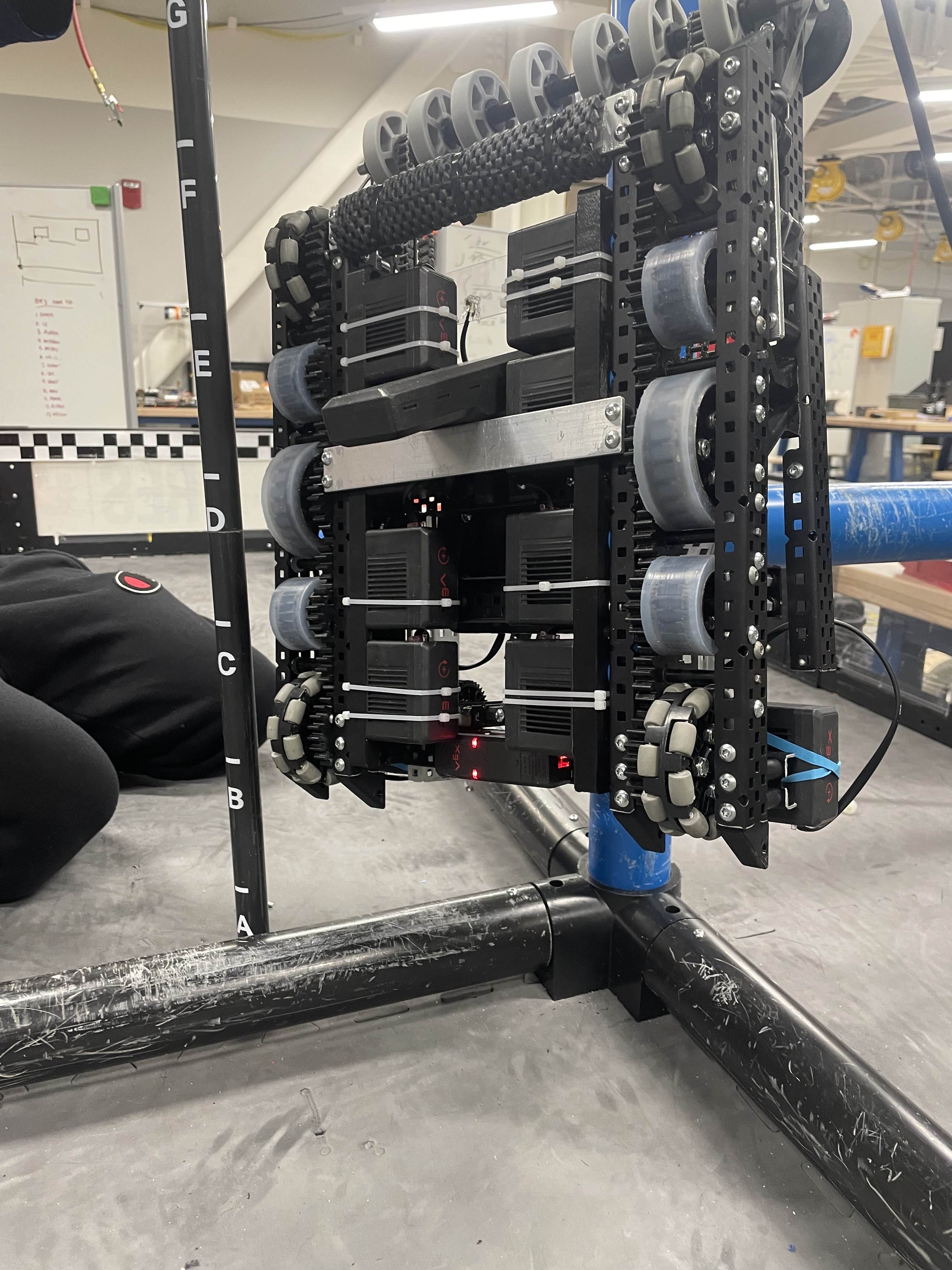
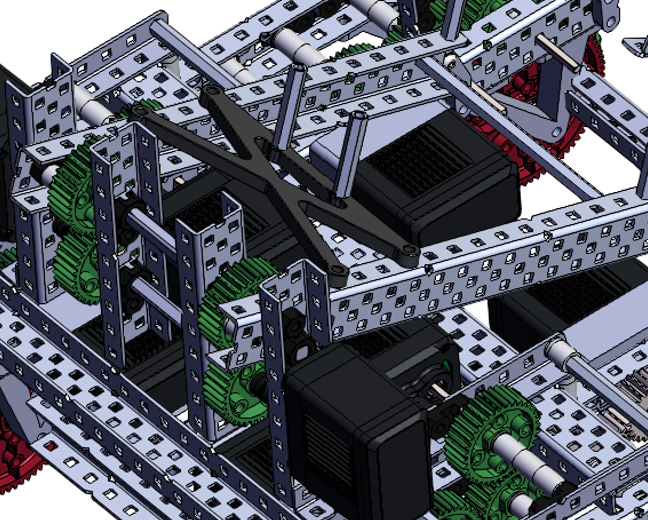
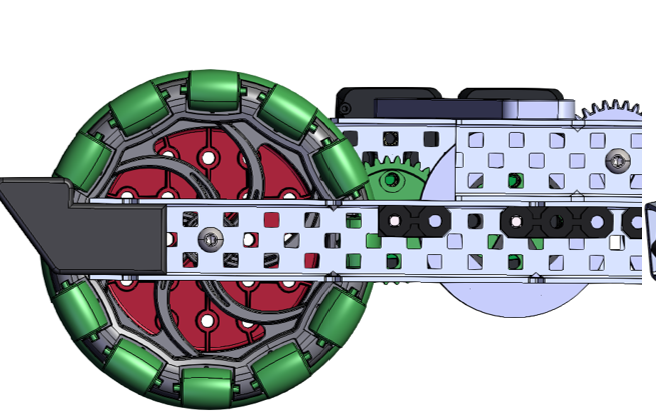
Drive Train
- Worked on design and manufacturing of molded wheels used for greater traction and more mobility on the robots.
- Developed a custom 3D-printed motor cap system for compact motor stacking and rapid servicing, increasing drivetrain rigidity and modularity.
- Implemented a sled-assisted barrier traversal system, allowing smooth crossing while maintaining traction and chassis stability.
- Optimized motor positioning and gear spacing to fit within the 15in frame perimeter while supporting high-speed field traversal.
- Learned/Developed: CAD packaging for multi-motor layouts; rapid prototyping using VEX components; iterative testing for traction optimization; drive control coordination with software subteam.

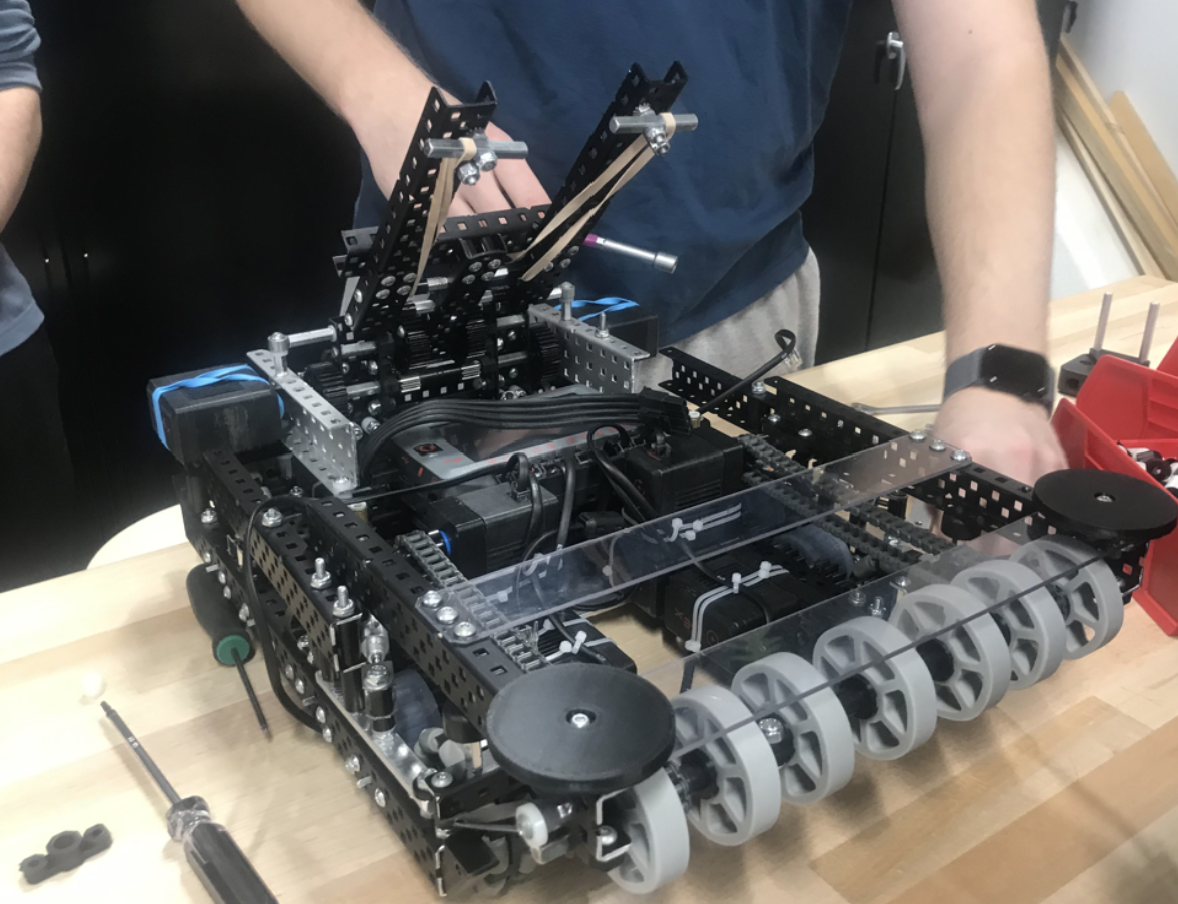
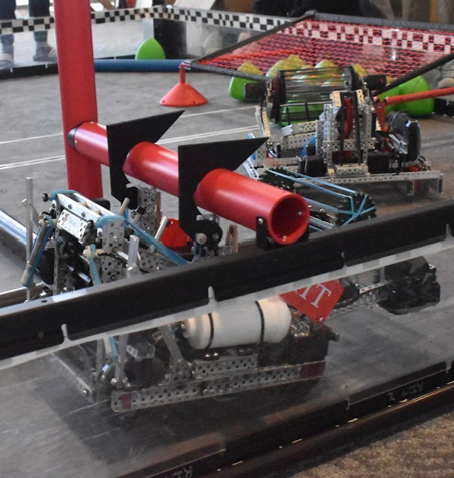
Catapult System
- Designed and tuned a dual-motor catapult mechanism for the 24in competition robot, capable of launching triballs across the field with consistent trajectory control.
- Integrated elastic energy storage and release optimization using high-tension rubber bands and ratcheted release systems for rapid reloading during autonomous periods.
- Collaborated with the programming team to synchronize catapult firing and indexing with intake and autonomous routines, improving scoring precision.
- Performed iterative launch angle and compression testing to maximize scoring consistency while reducing cycle times between shots.
- Learned/Developed: Mechanical energy storage principles; iterative prototype tuning; cross-team software integration; precision adjustment for high-speed competition mechanisms.